This article is in part based on http://www2.stat.duke.edu/~sayan/Sta613/2017/lec/LMM.pdf.
In this post we describe how linear mixed models can be used to describe longitudinal trajectories. An important linear model, particularly for longitudinal data, is the linear mixed model (LMM). The basic linear model assumes independent or uncorrelated errors for confidence intervals and a best linear unbiased estimate via ordinary least squares (OLS), respectively. However, often data is grouped or clustered with known group/cluster assignments. We expect that observations within a group/cluster will be correlated. An LMM provides an elegant model to handle this grouping.
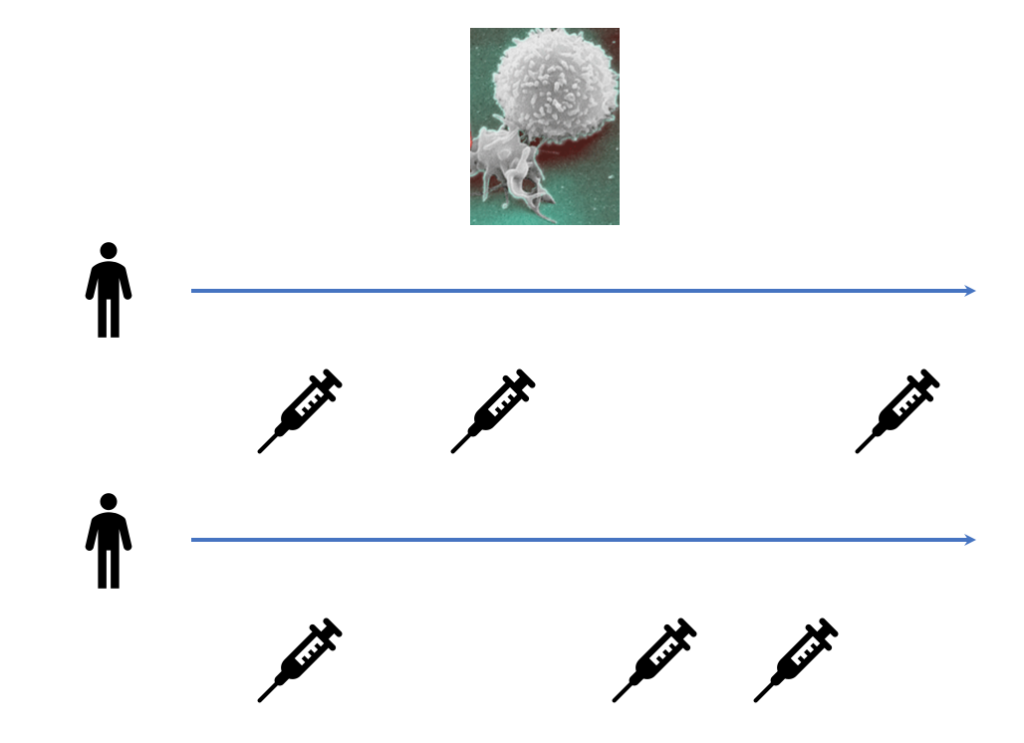
For a static example, say you have a counseling program for smoking and you want to model the effect of some covariates (age, weight, income, etc) on lapse frequency. You have a number of different counselors and each participant is randomized to a different counselor. You expect that both the baseline response and how covariates affect the response varies across counselors. Here the group is the counselor. For a longitudinal example, say you have a number of HIV/AIDS patients and you track their white blood cell counts over time. You want to model the effect of time on white blood cell counts. You expect that the white blood cell count at the start of measurement and the effect of time on the white blood cell count vary between individuals. In this case, the group or cluster is the individual: repeated observations within an individual are correlated.
Intuition
In an LMM for longitudinal data, the observed process is a noisy realization of some linear function of time and possibly other covariates. Further, every individual patient has some deviation from the global behavior. In the HIV/AIDS case, every patient has a different smooth underlying true trajectory, and their observed white blood cell counts are noisy measurements of this true trajectory. We want to first estimate the average trajectory, described by the fixed effects or global parameters  . Then we estimate the individual specific deviations from the average trajectory, described by the random effects or latent variables per patient
. Then we estimate the individual specific deviations from the average trajectory, described by the random effects or latent variables per patient  . These definitions of fixed and random effects come from the biostatistics literature: in econometrics fixed and random effects mean something else.
. These definitions of fixed and random effects come from the biostatistics literature: in econometrics fixed and random effects mean something else.
The Model
Scalar Representation
Assume that we have  patients or participants in a study, and for each participant, we have
patients or participants in a study, and for each participant, we have  observations, where the indexing orders them in time. To start with we look at the case where non-transformed time is the only covariate. Let
observations, where the indexing orders them in time. To start with we look at the case where non-transformed time is the only covariate. Let  be the health measurement value for patient
be the health measurement value for patient  at observation
at observation  : this could be the CD4/white blood cell count in AIDS. Then the LMM takes the form
: this could be the CD4/white blood cell count in AIDS. Then the LMM takes the form
(1)

and
- Let
 . Then .
. Then . - Let . Then
- We also assume that all random effect and error vectors are independent from each other. That is, are independent. This is saying that within a patient, random effects are independent of errors, and that we have independence across patients.
 . Then
. Then  .
. . Then
. Then 
 are independent. This is saying that within a patient, random effects are independent of errors, and that we have independence across patients.
are independent. This is saying that within a patient, random effects are independent of errors, and that we have independence across patients.Here  are the fixed effects, and
are the fixed effects, and  are the random effects, with
are the random effects, with  and
and  . The fixed effects can be thought of as the average effects across patients (global parameters in machine learning terminology), while the random effects are the patient specific effects (latent variables per person). The term
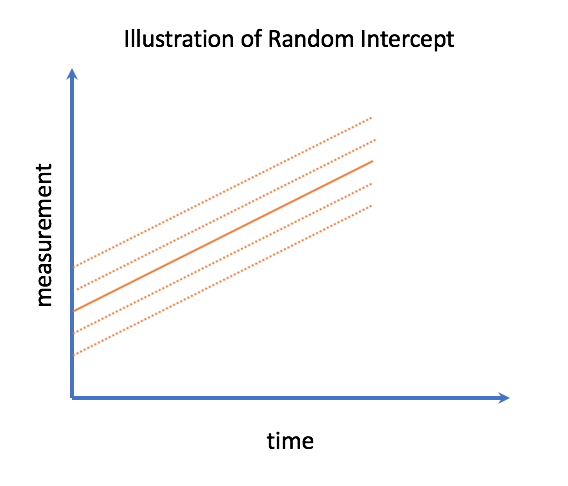
. The fixed effects can be thought of as the average effects across patients (global parameters in machine learning terminology), while the random effects are the patient specific effects (latent variables per person). The term  is called the random intercept, and
is called the random intercept, and  is the random slope.
is the random slope.
As you may have noticed, we made normality assumptions. In the standard linear regression model with only fixed effects and without random effects, normality assumptions are not necessary to estimate , although they are necessary for confidence intervals when the sample size is small. However, in the mixed model setting, while they are not necessary to fit , they are necessary to derive predictions for  , as we shall see.
, as we shall see.
Vector and Matrix Representation
We can extend this to a vector-matrix representation along with more features. In the longitudinal case these features may be rich basis functions of time. Let  be the covariate vector for fixed effects for patient at observation , along with a
be the covariate vector for fixed effects for patient at observation , along with a  in the first position. Let
in the first position. Let  be the same for random effects. In many cases, both of these are simply basis functions of
be the same for random effects. In many cases, both of these are simply basis functions of  . We can then define
. We can then define
(2)

Here  is the design matrix for for the fixed effects and
is the design matrix for for the fixed effects and  is the design matrix for random effects. Let
is the design matrix for random effects. Let  be the vector of all observations, where
be the vector of all observations, where  , and similarly for
, and similarly for  . Further, let
. Further, let
(3)

Then the model is
(4)

where we make the assumptions
Random Intercept
In a longitudinal setting a random effect which is not associated with a covariate is called the random intercept, and has an important interpretation. It is the deviation from average for the ‘true’ trajectory when they’re first observed. In the HIV/AIDS case, this is how much a patient’s starting health values deviates from average when they enter the study.
 , or more generally when all covariates have value .
, or more generally when all covariates have value .Random Slope
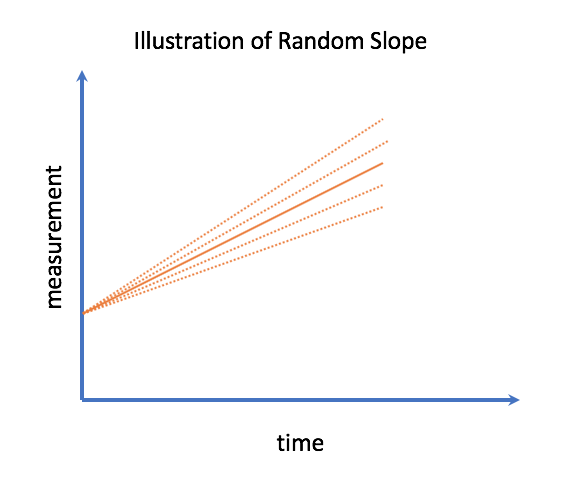
In the case of a single covariate, particularly non-transformed time, we can call the other random effect the random slope. This describes how the rate of evolution of the health process deviates from the average person.
Estimation and Prediction
We first describe how to estimate when both the covariance matrices for random effects  and for errors
and for errors  are known. Then we describe how to predict . In practice, and are not known, so we then show how to estimate them. Finally, we show how to fit confidence intervals.
are known. Then we describe how to predict . In practice, and are not known, so we then show how to estimate them. Finally, we show how to fit confidence intervals.
Known Covariance Matrix
Expressing the Linear Mixed Model as Gaussian Linear Regression
We can express the model described in part I with fixed and random effects as a Gaussian linear regression problem with only fixed effects (no random effects). Here, however, the covariance matrix between error terms is not only heteroskedastic, but non-diagonal. To see how, consider
(5)

Then since  , we have
, we have
(6)

With  and
and  , we have a Gaussian linear regression model. However, the linear regression assumption of independent homoskedastic (equal variance) errors is violated. In particular, for the covariance
, we have a Gaussian linear regression model. However, the linear regression assumption of independent homoskedastic (equal variance) errors is violated. In particular, for the covariance  , we can have both non-identical diagonal elements (heteroskedasticity) but also correlation between elements of
, we can have both non-identical diagonal elements (heteroskedasticity) but also correlation between elements of  . We call this Gaussian linear regression setup the marginal model.
. We call this Gaussian linear regression setup the marginal model.
Estimating : Generalized Least Squares
While ordinary least squares is not the best linear unbiased estimator (BLUE) in the presence of correlated heteroskedastic errors, another estimation technique, generalized least squares (GLS), is. Let  be the covariance matrix for . Then the GLS estimate is given by
be the covariance matrix for . Then the GLS estimate is given by
(7)

For a derivation of this estimator, see http://halweb.uc3m.es/esp/Personal/personas/durban/esp/web/notes/gls.pdf.
Predicting
Since is a random or local latent vector rather than a fixed parameter, we want to predict rather than estimate it. One prediction we can use is  . We can calculate this in three steps:
. We can calculate this in three steps:
- Note that and are jointly multivariate normal
- Compute the covariance between them and get the full joint distribution of the random vector .
- Use properties of the multivariate normal to get the conditional expectation
 and
and  .
.In order to compute the covariance between them, note that
(8)

This gives us that  .
.
We can then use the conditional expectation for a multivariate normal (see https://stats.stackexchange.com/questions/30588/deriving-the-conditional-distributions-of-a-multivariate-normal-distribution) to obtain
(9)

This is the best linear unbiased predictor (BLUP). To see a proof, see https://dnett.public.iastate.edu/S611/40BLUP.pdf. Next we show what to do when the covariance parameters are unknown.
Unknown Covariance Matrix
Maximizing the Likelihood
One way to estimate  is to maximize the likelihood. Recall that we have the marginal model
is to maximize the likelihood. Recall that we have the marginal model  with
with  , where is the design matrix for random effects. Let . We can assume that both and are parametrized by variance components , so that
, where is the design matrix for random effects. Let . We can assume that both and are parametrized by variance components , so that
(10)

We can then consider the joint log-likelihood of and , given by
(11)

however we want to estimate , so is a nuisance parameter. It is difficult to maximize the joint likelihood directly, but there is an alternate technique for maximizing a joint likelihood in the presence of a nuisance parameter known as the profile likelihood. The idea is to suppose that is known, and then holding it fixed, derive the maximizing  . We can then substitute with in the likelihood, giving us the profile log-likelihood
. We can then substitute with in the likelihood, giving us the profile log-likelihood  , which we maximize with respect to . The profile likelihood is the joint likelihood with the nuisance parameter expressed as a function of the parameter we want to estimate. As in the above, often this function is the likelihood maximizing expression for the nuisance parameters.
, which we maximize with respect to . The profile likelihood is the joint likelihood with the nuisance parameter expressed as a function of the parameter we want to estimate. As in the above, often this function is the likelihood maximizing expression for the nuisance parameters.
Let  be the likelihood with fixed. Overall, we are evaluating the following
be the likelihood with fixed. Overall, we are evaluating the following
(12)

This gives us the maximum likelihood estimate  . For more on the profile log-likelihood, see https://www.stat.tamu.edu/~suhasini/teaching613/chapter3.pdf.
. For more on the profile log-likelihood, see https://www.stat.tamu.edu/~suhasini/teaching613/chapter3.pdf.
It turns out that the maximum likelihood estimate for is biased. However, an alternative estimate, the restricted maximum likelihood, is unbiased.
Restricted Maximum Likelihood
The idea for the restricted maximum likelihood (rMEL) for LMM is that instead of maximizing the profile log-likelihood, we maximize the marginal log-likelihood, where we take the joint likelihood and integrate out. Note that this is not the standard intuition for rMEL, but it works for Gaussian LMM. For a more general treatment, see http://people.csail.mit.edu/xiuming/docs/tutorials/reml.pdf.
Let  be the joint likelihood of and . Then we want to maximize
be the joint likelihood of and . Then we want to maximize
(13)

which is given by (see http://www2.stat.duke.edu/~sayan/Sta613/2017/lec/LMM.pdf for a full derivation)
(14)

maximizing this gives us the restricted maximum likelihood estimate  , which is unbiased.
, which is unbiased.
Putting it all Together to Estimate and predict
Finally, to estimate , we estimate the covariance matrix  from the above, and then estimate as
from the above, and then estimate as
(15)

Similarly, to predict , we have
(16)

Confidence Intervals
Marginal Confidence Intervals for

Since  and
and  , we can derive the covariance matrix for
, we can derive the covariance matrix for  .
.
(17)

In OLS, the variance of the estimator is a function of the true variance. Here, it is a function of both the true covariance and the estimate of the covariance. Further, in OLS we have an estimator for the error variance that is a scaled  , which allows us to compute exact
, which allows us to compute exact  marginal confidence intervals under Gaussian errors. We don’t have this here (as far as I know), so we use approximate marginal confidence intervals
marginal confidence intervals under Gaussian errors. We don’t have this here (as far as I know), so we use approximate marginal confidence intervals
(18)

This will tend to underestimate  since we didn’t explicitly model the variation in the estimated variance components
since we didn’t explicitly model the variation in the estimated variance components  . However as the sample size grows this will become less of an issue.
. However as the sample size grows this will become less of an issue.
Hypothesis Test
We can test the null hypothesis that an individual coefficient is against the alternative that it is non-zero. That is, test  versus
versus  . Let
. Let  . We reject the null
. We reject the null  if and only if
if and only if
(19)

Unfortunately (as far as I know), the finite sample properties of this hypothesis test are not fully understood.